本文主要介绍ARM 和 CortexM3
1. ARM 处理器命名:
早期的命名方法是在数字后面添加字母后缓,用来进一步明细该处理器支持的特性。 > 例如:ARM7TDMI 来说,T: Thumb 指令集,D:支持 JTAG 调试,M 指快速乘法器,则对应一个嵌入式 ICE 模块。
后来,这 4 项基本功能成了任何新产品的标配,便不再使用这 4 个字母后缓。而是采用数字加字母的命名方法:
- 数字 1:表示产品系列
- 数字 2:表示性能级别。较小的数字通常表示低功耗和低性能,而较大的 数 字表示高性能级别
- 字母后缀:用于指示具体的配置和特性
- T:表示支持 Thumb 指令集,使用 16 位指令来提高代码密度
- F:表示支持浮点运算单元(FPU)
- E:表示支持嵌入式特性 > 例如 ARM920T,9: 9 代表产品系列,20: 处理器的性能级别和种类。数字越大,代表着更高性能的处理器版本。T: Thumb 指令集。
再后来,新的特性不断加入,于是形成了新一套命名法,这套命名法也是一直在使用的。 以 Cortex 作为主名,根据应用领域分为 Cortex-M,Cortex-A,Cortex-R。后面字越大代表性能和功能较新和更高级别的处理器架构。

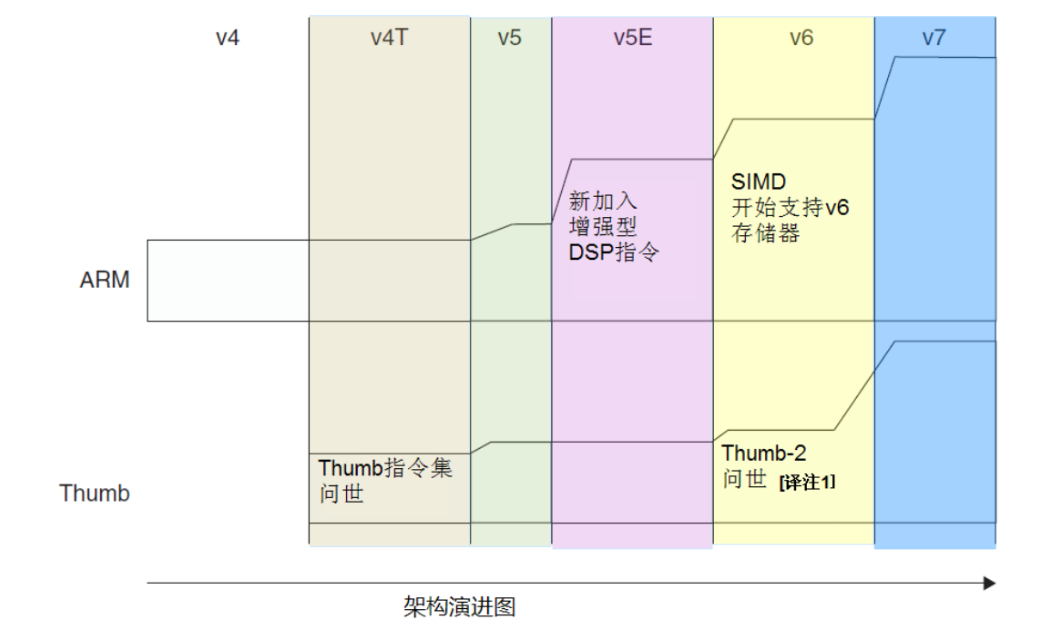
2. 指令集的发展
由于历史原因(从 ARM7TDMI 开始),ARM 处理器一直支持两种形式上相对独立的指令集,它们分别是:
- 32 位的 ARM 指令集。可以实现 ARM 架构下所有功能。对应处理器状态:ARM 状态
- 16 位的 Thumb 指令集。是 ARM 指令集的一个子集,能带来更高的代码密度。对应处理器状态:Thumb 状态
这两种指令集也对应了两种处理器执行状态。在程序的执行过程中,处理器可以动态地在两种执行状态之中切换。
Thumb 指令集仅仅把常用的 ARM 指令压缩成 16 位的指令编码方式。在指令的执行阶段,16 位的指令被重新解码,完成对等的 32 位指令所实现的功能。
与全部用 ARM 指令集的方式相比,使用 Thumb 指令可以在代码密度方面改善大约 30%。但是,这种改进是以代码的效率为代价的。尽管每个 Thumb 指令都有相对应的 ARM 指令,但是,相同的功能,需要更多的 Thumb 指令才能完成。
因此,当指令预取需要的时间没有区别时,ARM 指令相对 Thumb 指令具有更好的性能。
Thumb-2 指令集在现有的 Thumb 指令的基础上做了如下的扩充:
- 增加了一些新的 16 位 Thumb 指令来改进程序的执行流程
- 增加了一些新的 32 位 Thumb 指令以实现一些 ARM 指令的专有功能 32 位的 ARM 指令也得到了扩充
- 增加了一些新的指令来改善代码性能和数据处理的效率给 Thumb 指令集增加 32 位指令就解决了之前 Thumb 指令集不能访问协处理器、特权指令和特殊功能指令的局限
- 新的 Thumb 指令集现在可以实现所有的功能,这样就不需要在 ARM/Thumb 状态之间反复切换了,代码密度和性能得到的显著的提高
参考 论 ARMv7 Thumb-2 指令集的性能(含 Thumb 指令集介绍)【转载】
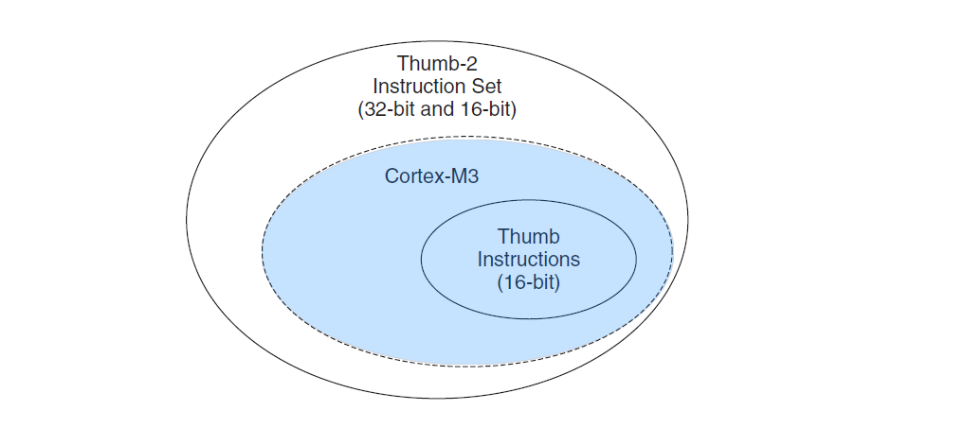
可以看到 Cortex-M3 只支持 Thumb-2 指令集,并且只实现了 Thumb‐2 的一个子集。